Tutorial
Hardware 24Ghz Radarsensorik
Stand: 18.05.2020
Das Tutorial zur einfachen Signalauswertung eines CW-Radarsensors kennen Sie ja schon. An dieser Stelle möchte ich noch ein paar Grundlagen zum Thema Radar geben oder schlicht erklären was Sie mit einem Radarsensor tun können
oder nicht. Das ganze aber einmal aus Hardwaresicht.
Ich möchte das so einfach wie möglich gestalten, also sehen Sie mir bitte nach, das einige Sachverhalte sehr stark vereinfacht dargestellt werden und es daher auch keine
Herleitung von Formeln geben wird.
Während Radar früher oftmals mit Militär verbunden war, finden nun schon seit weit mehr als 20 Jahren unzählige Anwendungen im zivilen sprich alltäglichen Bereich statt. Der Begriff Radar hat sich in den letzten Jahren mehr
und mehr verwaschen, da mittlerweile auch Anwendungen damit in Verbindung gebracht werden, die mit dem Gedanken „Detection and Ranging“ nichts mehr zu tun haben.
Da mein Herz für die klassischen Anwendungen schlägt
werde ich mich auf die Bereiche Detektion und Ortsbestimmung von Objekten beschränken.
Also fangen wir endlich an....
Was kann ein Radarsenor im klassischen Sinn:
- Detektion von bewegten Objekten
- Detektion von stehenden Objekten
- Messung der Geschwindigkeit von einen oder mehreren Objekten
- Bestimmung der Bewegungsrichtung von einen oder mehreren Objekten
- Bestimmung des Abstandes zu einem oder mehreren bewegten Objekten
- Bestimmung des Abstandes zu einem oder mehreren stehenden Objekten
- Bestimmung der Ortskooordinate von einem bzw. der Ortskoordinaten von mehreren Objekten in einer Ebene
- Bestimmung aller oben genannten Punkte für mehrere Objekte im Raum
Ich möchte mich in diesem Tutorial auf die ersten drei fett hervorgehobenen Punkte beschränken, da die Komplexität mit der Abstandsmessung und weiteren Techniken sehr stark zunimmt.
Wie ist ein Radarsensor mit den oben genannten Messmöglichkeiten aufgebaut?
Letztlich besteht so ein Radarsensor grundlegend aus nur drei Komponenten:
- Oszillator (erzeugt die elektromagnetische Welle)
- Antenne (strahlt die elektromagnetische Welle ab und empfängt das reflektierte Signal)
- Mischer (bringt das hochfrequente Signal ins Basisband)
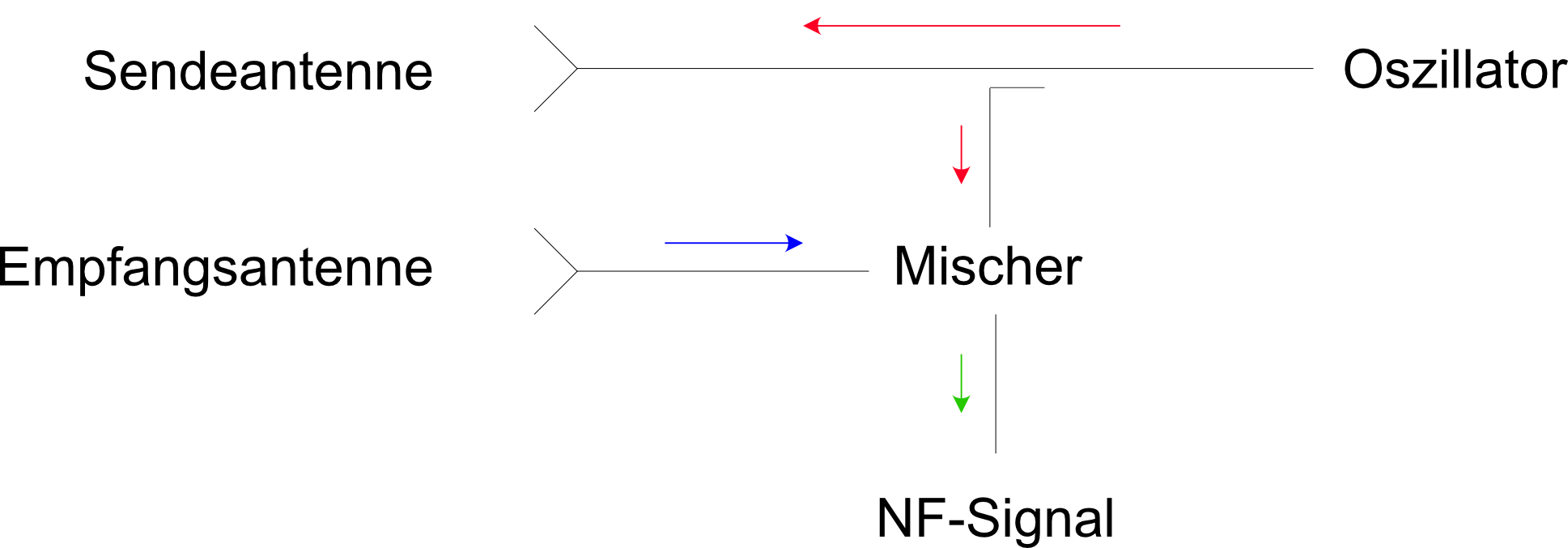
Was geschieht in dem Sensor....
Der Oszillator erzeugt ein hochfrequentes Signal. Bei einem Oszillator unterscheidet man grundlegend zwischen Festfrequenzoszillator, der nur eine Frequenz erzeugen kann und modulierbaren
Oszillatoren (sogenannte VCOs) die über eine Steuerspannung in der Sendefrequenz verändert werden können. Im
Folgenden beziehe ich mich nur auf Festfrequenzoszillatoren, da die genannten Anwendungen alle im CW (continous
wave) Bereich gelöst werden können. In beiden Fällen wird das erzeugte Signal zum größten Teil über die Sendeantenne abgestrahlt und zu einem kleinem Teil in den Mischer gespeist (rote
Pfeile).
Der Mischer "mischt"
dieses Signal mit dem über die Empfangsantenne empfangenen Signal (welches um die Dopplerfrequenz verschoben ist) und erzeugt dabei das Basisbandsignal (NF-Signal), welches typ. (bei unseren drei genannten Applikationen und
abhängig von Ihrer Applikation ) zwischen einigen Hz und mehreren kHz liegt.
Beim Mischer unterscheidet man zwischen Mono- und Stereo Mischern. Der Stereomischer verfügt über einen zweiten Mischerzweig der um 90° phasenverschoben
zum 1. Kanal ist. Je nachdem ob die Phase dann dem 1. Kanal vor- oder nacheilt, kann festgestellt werden, ob sich ein Objekt nähert oder entfernt. Im Falle des IPM-165 handelt es sich um einen Monomischer (d.h. 1 kanaligen Modul
ohne direkte Richtungserkennung)
Ähem, Moment hochfrequent? Basisband?
Wenn ich hier von hochfrequent spreche meine ich in unserem Fall eine Frequenz von 24GHz. Das ist aktuell die am gebräuchlichste
Frequenz, wenn wir von Radarsensorik im kommerziellen Bereich sprechen. Es gibt auch noch verwendete Frequenzen in der Radartechnik, die tiefer liegen (z.B. 10,5GHz oder 13,7GHz). Doch auch noch deutlich höhere (z.B. 61GHz,
77GHz und 122GHz).
Die Verwendung der Frequenzen ist hierbei von den durch die Frequenzregulierungen gegeben Eckparameter bestimmt. Da die 24GHz quasi weltweit (mit kleinen Einschränkungen in einzelnen Ländern) zugelassen
ist, hat sich diese Frequenz bis dato durchsetzen können.
Ja, 24GHz, was bedeutet das? Ist das viel? Ob das viel ist oder nicht liegt im Auge des Betrachters. Für mich nicht. Da fängt der Spaß bei 122GHz und darüber an.
Für andere sorgen evtl. auch schon 24GHz für Erstaunen. Ein alter Spruch im Bereich der Hochfrequenztechnik, je höher die Frequenzen, desto länger die Gesichter.
Zur persönlichen Einschätzung
1Hz (1 Hertz)
bedeutet: eine Schwingung pro Sekunde
Das G in GHz bedeutet Milliarde: 24GHz entsprechen 24.000.000.000 Schwingungen pro Sekunde
(zum Vergleich: Netzfrequenz in Dtl. 50Hz; WLAN typ. 2.4GHz oder 5.8GHz)
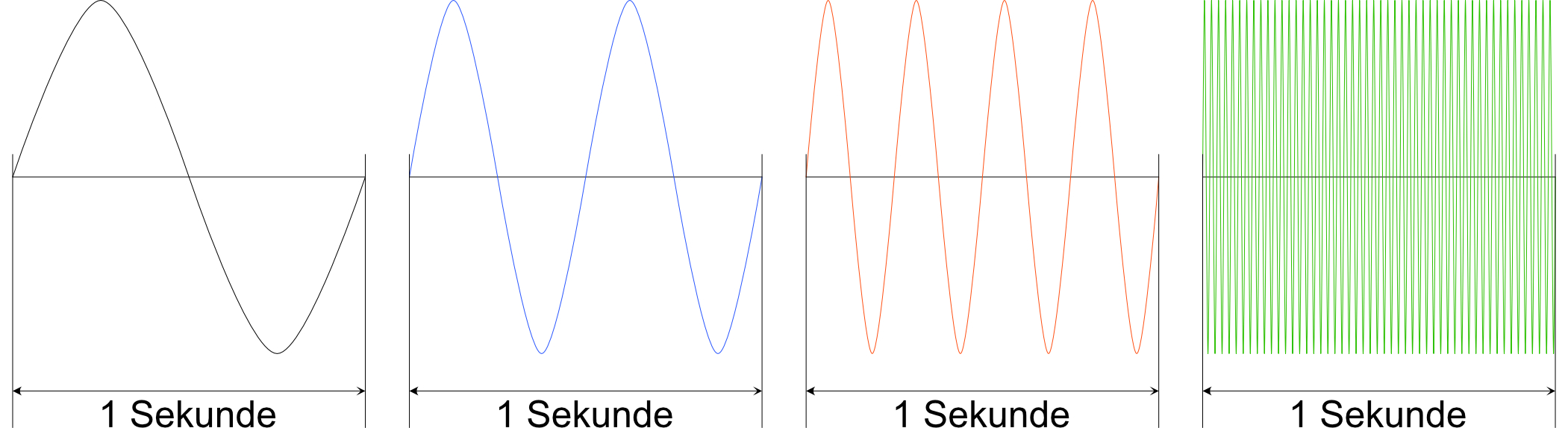
Statt den 50Hz im rechten Bild müssen Sie sich 24 Millarden Schwingungen, also das 480.000.000fache innerhalb des gezeichneten Abschnitts von 1 Sekunde vorstellen.
Das gute aber ist, dass Ihnen als Anwender dieses hochfrequente
Signal grundsätzlich egal sein kann, da die Information die Sie interessiert im Basisband vorliegt und dieses sogenannte NF oder IF-Signal direkt am Radarsensor abgegriffen werden kann.
Ausgehend von den festgelegten
Anwendungen (Bewegungsdetektion und Geschwindigkeitsmessung) können Sie hier für den Einstieg davon ausgehen das Sie abhängig von der Geschwindigkeit des Objektes pro km/h eine Frequenz von 44Hz messen (lässt sich physikalisch
erklären).
Konkret: Sie werden wenn Sie ein Objekt das sich mit 1 km/h bewegt am Signalausgang eines CW Sensors ein Signal von 44Hz messen, bei 5 km/h 220Hz bei 250km/h entsprechend 11kHz. In der Applikation sollten
Sie daher vorher wissen, wie schnell Ihr schnellstes zu vermessene Ziel ist, um Ihren NF-Verstärker rauscharm auslegen und ihre Signalverarbeitung anpassen zu können (Abtastheorem).
Antenne
Auch wenn von vielen vernachlässigt, ist für mich die Antenne und die Wahl des richtigen Antennendesigns für die Applikation ein wichtiger Aspekt. Da im kommerziellen Bereich am meisten Patchantennen zur Verwendung kommen, beziehen
sich die nächsten Aussagen maßgeblich auf diesen Antennentyp.
Hierzu zum Einstieg: das Antennendiagramm.
Jede Antenne hat ein charakteristisches Antennendiagram, welches angibt, welcher Bereich vor
dem Sensor überhaupt erfasst wird. Wichtige Kenngrößen einer Antenne einmal ganz rudimentär erklärt:
3dB Breite / 10dB-Breite
Beide Werte geben an, bei welchen Winkel das Empfangssignal um 3dB bzw.
10dB abgefallen sind und werden im Azimut und in Elevation gemessen (hört sich hochtrabend an, letztlich wird der Sensor bei der Messung nur um 90° gedreht). Daraus ergibt sich eine Ellipse (bzw. ein ellipsenförmiges Gebilde, welches
grob den zu erwartenden Erfassungsbereich des Sensors angibt).
Generell empfehle ich den Radarsensor schon immer so auszuwählen, das er vom Anntennendiagramm schon möglichst gut zur Applikation passt. Wenn Sie auf 30m z.B. die
Geschwindigkeit eines Fahrzeugs auf einer Straße detektieren möchten, macht es keinen Sinn eine Antenne mit breiter Abstrahlung zu verwenden. Da Sie zu viele Umgebungsbewegungen mitbekommen, wird eine robuste Auswertung
erschwert.
Desgleichen macht eine hoch bündelnde Antenne keinen Sinn, wenn Sie eine Bewegung im Nahbereich (z.B. Näherungssensor zum schalten einer Lichtquelle in einen Zimmer) detektieren möchten.
Nebenkeulenunterdrückung
Der letzte interessante Wert ist die sogenannte Nebenkeulenunterdrückung.
D.h. neben dem gewünschten Hauptbeam bildet jede Antenne Nebenkeulen (side lobes). Diese sollten 10 – 15dB unterdrückt sein (nehmen Sie diesen Wert
an dieser Stelle einfach als Kenngröße einer guten Antenne hin).
Generell gilt bei Antennen, je mehr Sie den Strahl fokussieren möchten, desto größer die Antennenfläche. Je breiter Sie schauen möchten, desto
kleiner die Antennenfläche.
Nähere Informationen finden Sie in meinem Antennen Tutorial!
Reichweite
Stellt sich die Frage, welche Reichweite kann ich mit einen Radarsensor erzielen. Ja, sicher kann man diese anhand von Antennengain, Rauschzahlen, Phasenrauschen etc. berechnen. Nur hierzu müssen viele Kenngrößen bekannt sein,
bei denen sich die Hersteller nicht in die Karten schauen lassen. Hier
am besten beim Hersteller anfragen, ihre Applikation nennen und der kann Ihnen dann einen Abschätzung geben.
Warum nur eine Abschätzung? Da die Reichweite
neben den Sensor sehr stark von der Signalverarbeitung abhängt ist und mit dem Ziel sehr stark variieren kann (Stichwort RCS – radar cross section).
Was bedeutet nun schon wieder RCS?
Hier auch nur ganz kurz,
dar RCS gibt an „wie gut ein Objekt Radarstrahlen reflektiert“.
Dabei ist dieser Wert letztlich aber von der Oberflächenstruktur / Material abhängig und lässt sich oft nur schwer errechnen.
Legendäres Beispiel: bei
24GHz hat eine erwachsene Person ca. den gleichen RCS wie eine zerdrückte Cola-Dose.
D.h. sie können anhand der Amplitude des Empfangssignals keinen Rückschluss auf die Größe des Objektes machen!
Und noch ein WICHTIGER Hinweis den Einstieg:
Versuchen Sie nie Anhand der Stärke des Empfangssignals (d.h. der Amplitude) Rückschlüsse auf die Größe eines Objektes oder gar die Entfernung zu einem Objekt zu machen. Das mit der Größe ist denke ich klar verständlich
(Cola-Dose <-> Mensch) aber die Entfernung. Naja, Großer RCS in großer Entfernung = kleiner RCS in der Nähe des Sensors.
Gut, das sollte es erst mal (mit einfachen Grundlagen) gewesen sein.
Fazit
Ich hoffe ich konnte an dieser Stelle ein wenig mehr Verständnis für die Radarsensor Hardware, die Auslegung und dessen Verhalten in der Applikation vermitteln. Sie werden wenn Sie sich ausführlicher mit dem Thema Radar beschäftigen
feststellen, dass es gerade beim Einstieg viele "Halbwahrheiten" gibt und ich hoffe Sie sehen mir das nach. Würde ich hier alles im Detail erklären wären wir gleich bei Nachschlagewerken aller Skolnik. Bei Interesse empfehle
ich Ihnen für den schnellen Einstieg ein Radar Evaluation Board. Oft lässt sich durch ein praktisches Beispiel leicht erkennen, ob Radartechnik für Ihr Projekt geeignet ist. Beachten Sie aber, dass genügend Grundkenntnisse
in Programmierung nötig sind, um Beispiele eines Evaluation Boards auf Ihre Applikation anpassen zu können.